- 会員限定
- 2017/03/28 掲載
宇宙エレベーターの要素技術「テザー」「クライマー」の開発はどこまで進んでいるのか
記事をお気に入りリストに登録することができます。
宇宙エレベーター協会「JSEA」では、宇宙エレベーターの活動を促すために2009年から宇宙エレベーターチャレンジ「GSPEC」なる取り組みを継続している。ヘリウムバルーン(係留気球)からテザー(ケーブル)を落とし、テザー上に参加チームが製作した「クライマー」と呼ばれる昇降機をつけて上昇下降を行走するというこのチャレンジは、宇宙エレベーターに限らず、あらゆる社会課題を解決するための要素技術が詰め込まれている。GSPECのほか、大学や民間企業で行われている「テザー」「クライマー」といった要素技術開発の進展状況などを紹介しよう。
1962年東京生まれ。東京電機大学工学部卒業。産業用ロボットメーカーの研究所にて、サーボモーターやセンサーなどの研究開発に4年ほど携わる。その後、アスキー入社。週刊アスキー編集部、副編集長などを経て、2002年にフリーランスライターとして独立。おもにロボット、ネットワーク、エンタープライズ分野を中心として、Webや雑誌で記事を執筆。主な著書に『キカイはどこまで人の代わりができるか?』など。
ロボットを組み合わせた「宇宙エレベーターチャレンジ」
会長
大野修一 氏
このチャレンジは、ヘリウムバルーン(係留気球)から「テザー」と呼ばれるケーブルを落とし、テザー上に参加チームが製作した「クライマー」と呼ばれる昇降機をつけて上昇下降を行走するというものだ。
上昇させる高さは、スタート当初の150メートルから2014年には1250メートルまで伸びた。だが、これ以上の高さになると風の影響を受けたり、航空法に引っかかったりしてしまう。肝心の競技フィールドも見つからないという課題も生まれた。
そこでGSPECでは、米ネバダ州の砂漠で10キロメートルから30キロメートルまでの高さを目標にヘリウムバルーンを上げて競技を行おうという、新たな計画が立案されているそうだ。
関連記事
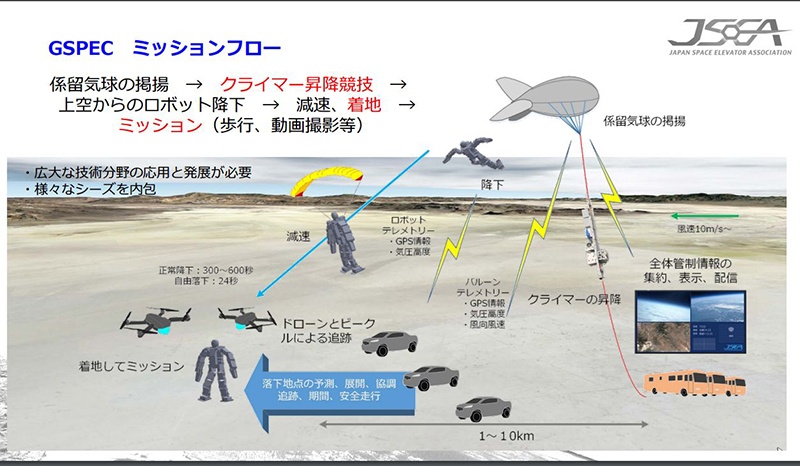
さらにGSPECでは、宇宙エレベーターに「ロボット」を組み合わせた新たな競技が企画されている。
ヘリウムバルーンを掲揚し、そこにクライマーを昇降させる。ここまでは従来までの競技と同様だ。これに加えて新競技では、このクライマーにロボットを載せ、上空からパラグライダーでロボットを降下させるというのだ。
ロボットは砂漠を着地したあとに、歩行あるいは走行したり、現地の動画を撮影したりといったミッションを行う。砂漠に着地したロボットは、無人のビークルとドローンで追跡する。
「競技を成功させるための技術として、GPSやテレメトリー、ロボット追跡、インターフェース、管制管理など、これからの産業に応用できそうなシーズが隠されている。スピンアウトの例としては、大規模災害時に使えるロボットや、民生用に利用できそうな係留気球があるだろう」(大野氏)
重要な要素技術「テザー伸展技術」も実証実験中
続いて、GSPECや宇宙エレベーター関連の開発を行っている研究者のパネル発表が行われた。トップバッターを務めた静岡大学の山極芳樹 氏は、宇宙エレベーターの実現に向けた「テザー伸展技術」について紹介した。
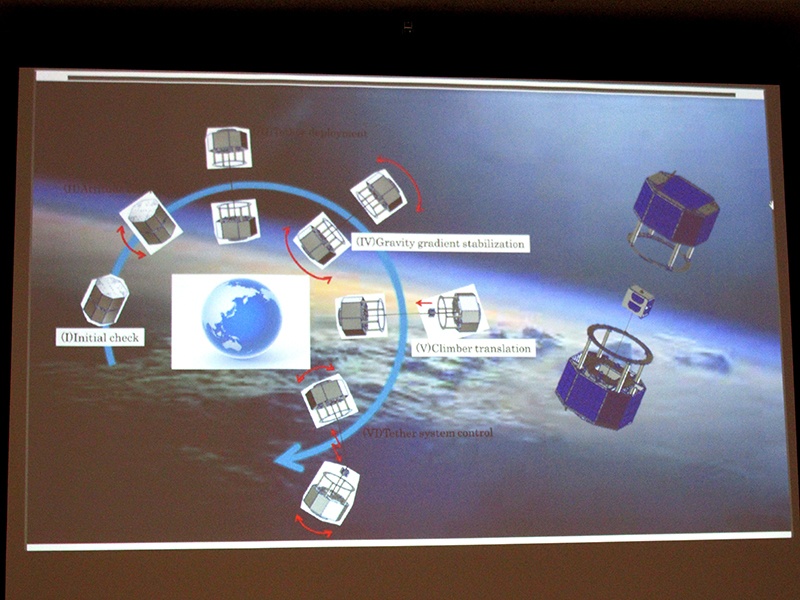
山極研究室では、10センチメートル角のCubeSAT「STARS-C」を国際宇宙ステーション日本実験棟・きぼうから放出し、親機と子機の間で長さ100メートルのテザー(ケーブル)を伸展させる実験を行う予定だ。昨年末にはすでに衛星が放出されており、現在はミッション実行に向けて通信系システムを調整中だという。
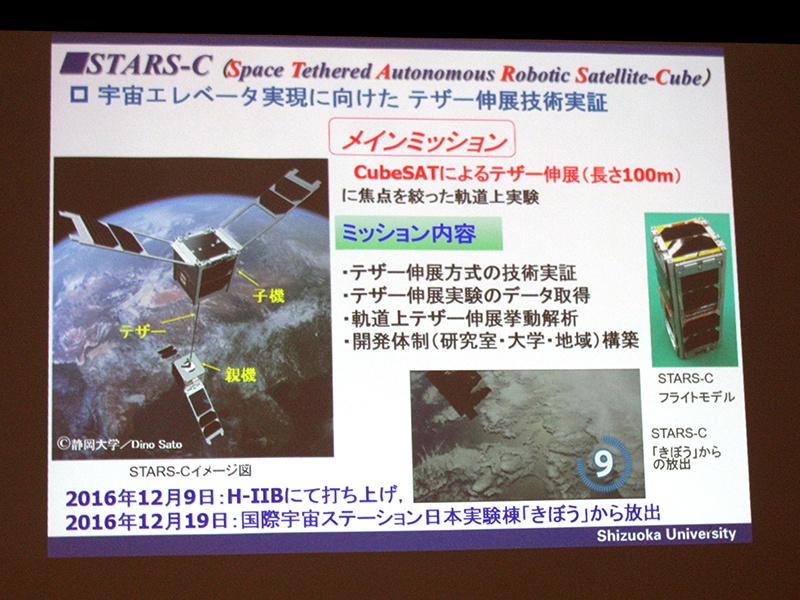
「宇宙エレベーターを実現するには、まずケーブルの動きが重要。そこで、軌道上でテザーを伸展させる実験が必要になる。具体的なミッションの手順は、まず衛星の太陽電池パドルを展開し、2つの衛星(親機と子機)を分離させ、テザーで伸展させていく」(山極氏)

工学部
教授
山極芳樹 氏
このほかにも、次世代の「ハイブリッドエレベーター」も計画中だ。 これは日本学術会議のマスタープラン2017に採用されたもので、成層圏エレベーター、軌道上エレベーターとスペースプレーンを組み合わせた宇宙輸送システムだ。
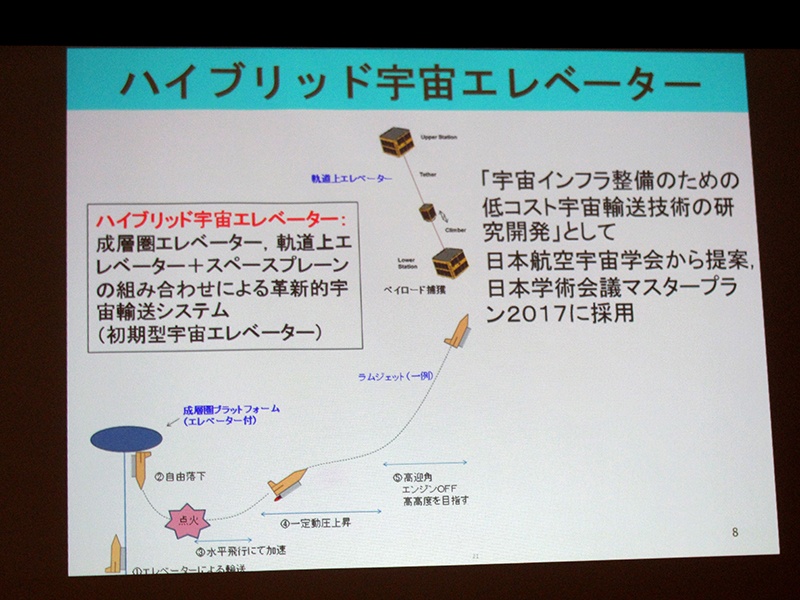
この成層圏エレベーターは、高度20キロメートル~30キロメートルの成層圏にバルーンなどのプラットフォームを浮揚させ、地上とテザーで結ぶものだ。これと軌道上エレベーターの間を、JAXAで開発が進むスペースレーンで結ぶという構想だ。
「ハイブリッドエレベーターは、本格的な宇宙エレベーターを構築する前段階の構想であり、10年かけて検証していく計画だ。今後の実現は、これからの活動にかかってくると思う」(山極氏)
テザー衛星の間をクライマーが自律移動する「STARS-E」

理工学部 教授
青木義男 氏
STARS-Eでは、クライマーがテザー衛星の間を自律移動していく。宇宙空間ではテザーに張力を持たせなければならないため、ある程度の長さを展開していく必要があるという。
「宇宙空間に長いテザーが長時間ただよっていれば、スペースデブリ(宇宙ゴミ)や他の衛星と衝突するリスクが高まる。そのため、決められた時間内でミッションを実行して欲しいという運用上の要望もある。そのあたりの計画もしっかりする必要がある」(青木氏)
衛星は小型のもので、テザーも釣り糸ぐらいの細さで、実績を残している素材が求められるという。運用上の課題としては、衛星の管制室もアマチュア無線の免許も必要だ。
将来的に本研究の成果を、インフラ点検ロボットへとスピンオフさせようとしているそうだ。ワイヤーロープや送電線、吊り橋などで作られているインフラは多いが、現在でもかなり老朽化が進んでいる。
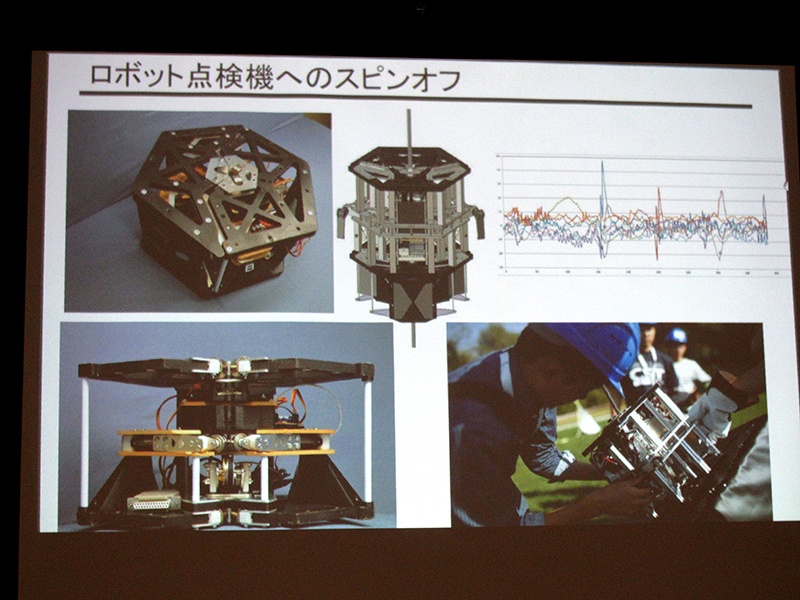
そこで青木氏は「これらのインフラを点検するために、全自動のロボットで対応させようと考えている。宇宙のみならず、その技術を地上でも役立つ点をアピールしていきたい」と強調した。
【次ページ】「ロープ型で世界最高の昇降」に成功した宇宙エレベーター用クライマー
関連タグ
あなたの投稿
PR
PR
PR
