- 2026/07/03 掲載
川崎重工業、ファナック、安川電機、フィジカルAIで協業、VTLAモデル開発へ
視覚や触覚などを統合したVTLAモデルのデータセットの共同構築
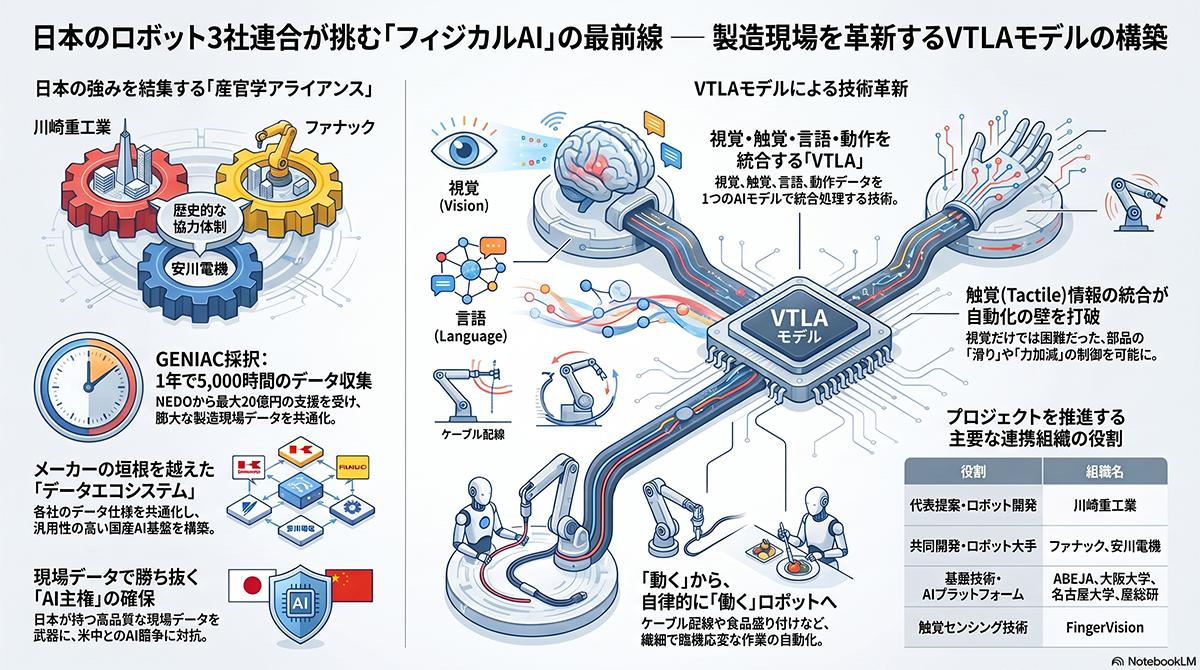
川崎重工業、ファナック、安川電機の国内産業用ロボット大手3社は、製造現場における「フィジカルAI」の社会実装に向け、視覚や触覚などを統合したデータセットの共同構築を開始する。経済産業省とNEDOが推進する生成AI開発支援プロジェクト「GENIAC」に採択された。競合する大手メーカーが枠組みを越えてデータ仕様を共通化し、複雑な手先作業の自動化基盤を整備する。

(画像:ビジネス+IT)
中核となる取り組みは、カメラなどから得られる視覚(Vision)、指先のセンサーによる触覚(Tactile)、人間の指示を理解する言語(Language)、ロボットの動作(Action)の各情報を統合的に処理する「VTLAモデル」の基盤構築である。初年度に製造現場から5000時間分の映像、触覚、動作データを収集し、このVTLAモデルに最適化したデータセットを設計・蓄積する。これまでロボットの動作設計は各メーカーの規格や現場ごとの個別開発に依存しており、人間の感覚を要する繊細な作業の自動化や、多品種少量生産への柔軟な対応が技術的な障壁となっていた。
【図版付き記事はこちら】川崎重工、ファナック、安川電機、フィジカルAIで協業へ「VTLAモデル開発」(図版:ビジネス+IT)
今回のプロジェクトにより、3社が共同でデータ仕様や収集基盤を共通化することで、特定のハードウェアに依存しない汎用的なデータエコシステムが形成される。これにより、ティーチングと呼ばれる従来の手動プログラム入力作業を大幅に削減し、自然言語での指示や未経験の環境にも適応可能なフィジカルAIの社会実装が加速する。少子高齢化に伴う労働力不足や熟練技能者の減少という製造業の深刻な課題に対し、世界シェアで優位に立つ国内ロボットメーカーが連合してAIの「脳」にあたる共通データ基盤を整備することは、国際的な開発競争における日本の優位性を確保する転換点となる。
ロボティクスのおすすめコンテンツ
Googleで見つけやすく
共有する
-
0
-
0
-
0
-
0
-
0
関連タグ
タグをフォローすると最新情報が表示されます
あなたの投稿
PR
PR
PR
