- 会員限定
- 2023/02/03 掲載
ROBOCIPや建設RXコンソーシアムに見る、ロボット開発の協調と競争の切り分けは可能か
ロボットはまだ発展途上の技術だ。これまでに使われてなかった分野にロボットを適用するためには基礎研究もまだまだ必要だし、実際に現場で使われるように普及活動も必要だ。これらについては各社がバラバラに取り組むよりも、業界全体で取り組んだほうが効率的だ。つまり「協調領域」と「競争領域」の切り分けである。業界全体で協調して進むべきところは足並みをそろえ、競うべきところで競うようにする。このような考え方での取り組みが、産業用ロボットの業界団体や、これからロボット活用を進めようとする建設業界でも進められている。「ROBOCIP」や「建設RXコンソーシアム」の取り組みの現状を少しのぞいてみたい。
フリーランスのサイエンスライター。1970年生。愛媛県宇和島市出身。1993年に広島大学理学部地質学科卒業。同年、NHKにディレクターとして入局。教育番組、芸能系生放送番組、ポップな科学番組等の制作に従事する。1997年8月末日退職。フリーライターになる。現在、科学技術分野全般を対象に取材執筆を行う。特に脳科学、ロボティクス、インターフェースデザイン分野。研究者インタビューを得意とする。

目標はシステムインテグレーションコストの半減
2022年末に行われた「横浜ロボットワールド」で、NEDOが進めている「革新的ロボット研究開発基盤構築事業」に関する発表があった。これは産業用ロボットを自動車、電機からさらに三品産業、サービス産業へ普及を進めるにあたり、大学の研究者と企業が組んで、2020年度から2024年度までの5年間をかけて進めているプロジェクトだ。システムインテグレーションコストの半減、自動化率3割向上を掲げている。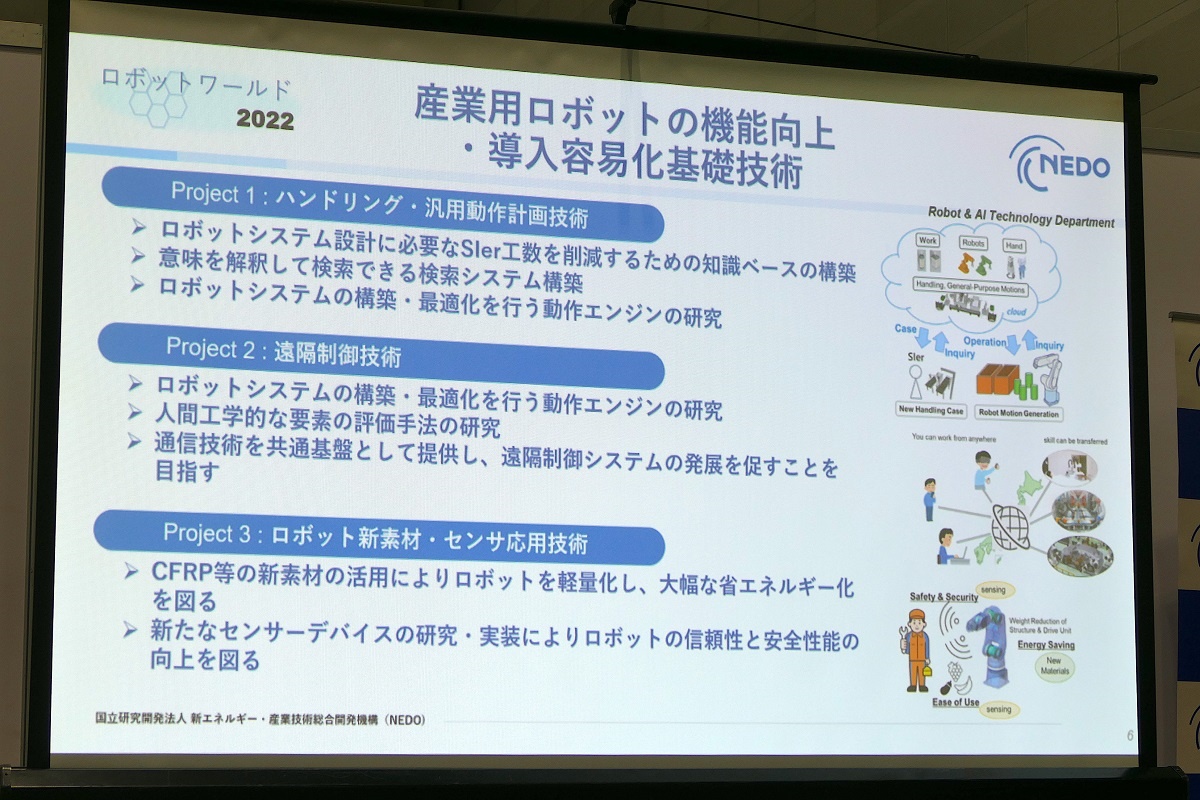
このNEDO事業には産業用ロボットメーカー9社が集まって2020年7月に発足した、技術研究組合 産業用ロボット次世代基礎技術研究機構(ROBOCIP)も参加して、ロボットの機能の向上と導入容易化に取り組んでいる。各社ごとの枠を超えて産業用ロボット技術に関する基礎研究を産学連携で共同して行うことを目的としているROBOCIPはこの事業で各大学と共同で、ロボットのシステムインテグレーションのコスト低減のための開発を行っている。「横浜ロボットワールド」では、デンソー、川崎重工業、安川電機の担当者からの発表が行われた。
無数の条件最適化やプログラムの手戻りを自動化支援
システムインテグレーションは引合、仕様検討、設計、製造、運用の各工程からなる。現在は、この各工程において、それぞれ一カ月以上の時間が必要とされている。しかも手戻りも多く、配置や供給位置などを変えると、またティーチングのコストが発生する。それらを自動化で支援し、全体のコストを下げることで、中小企業でも導入しやすくしようというものだ。具体的には無数のパターンが考えられる動作の最適化や部品選定・設計、手戻り、再ティーチングなどの手間を減らすために、ロボットや部品、周辺機器含めてデータ化し、自動設計技術で支援する。データベースはオープンにして、各プレーヤーがさまざまな属性を追加可能な仕組みとし、同じ形状で色が違ったり、置き方によって変形するものはインスタンスという概念で、その後の動作計画に活用できるようにする。
人の作業を自動でロボット作業に変換
これだけでも本当にできるのかなと思ってしまうが、さらに、人の作業を画像で捉えて分析し、それをロボット動作に自動変換する技術も開発中だ。動画を撮影したり、自然言語で命令を与えるだけで、それをロボット動作に自動変換するという技術だ。人とロボットは関節構造や稼働範囲が異なるが、その差分も合わせて、手順を自動化できる技術の開発を狙っているという。これが実現できたらかなりのインパクトがありそうだ。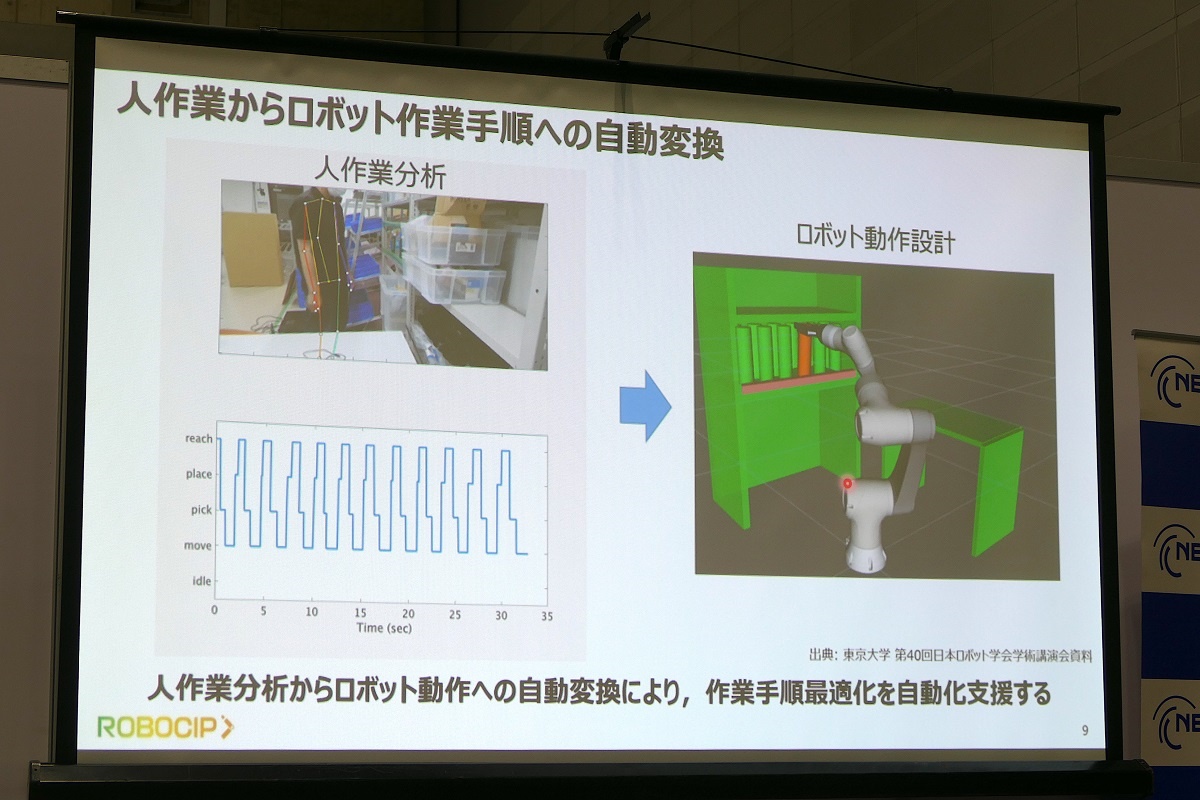
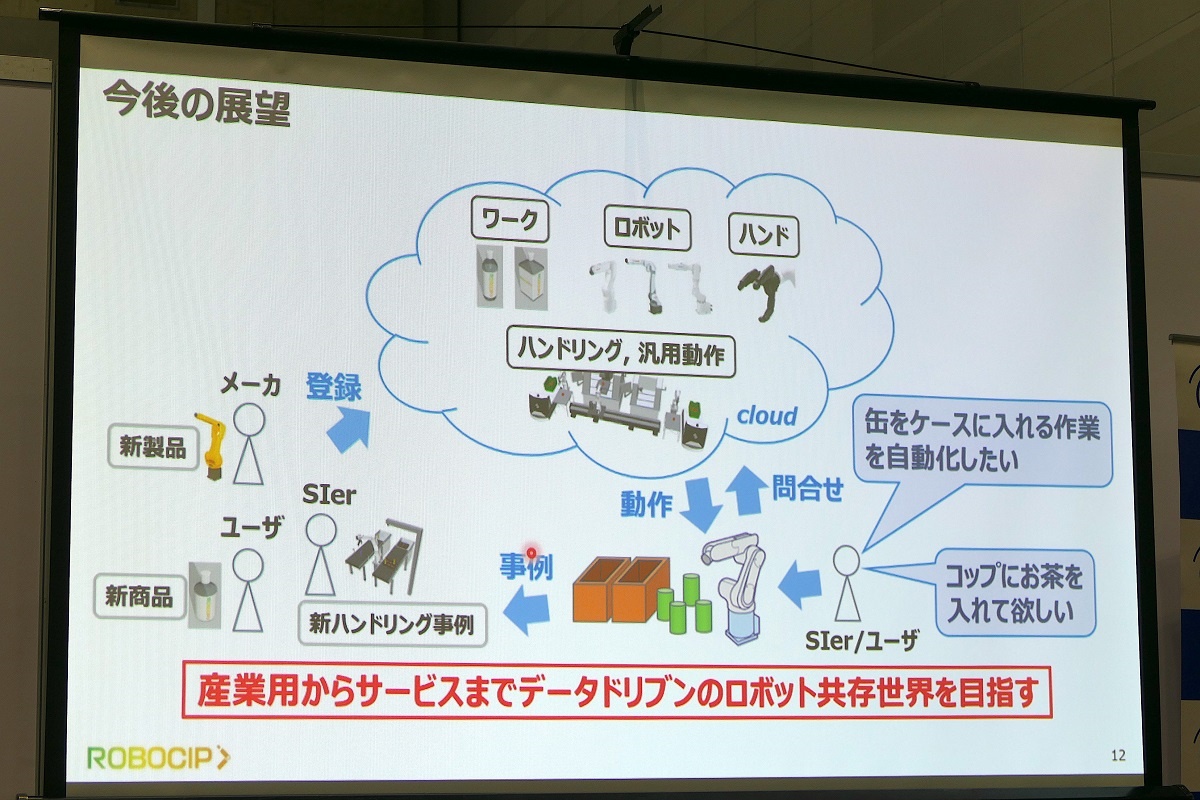
また部品に対して「把持安定度」を自動計算し、安定して物体を持てる最適なハンドを自動選定する。そしてデータベースから類似部品の把持動作を参照し、候補を作成し、動作のためのプログラミングも自動生成する。
理想的には、各メーカーが製品情報や部品を共通データベースに登録し、SIerやユーザーが、ロボット化したい作業を投げると自動化情報が返ってくるという世界を思い描いている。できたらすごい計画だ。
ロバストな遠隔制御実現でロボットのコストを下げる
2030年にはさまざまな業種で640万人の人手が不足すると考えられているが、人手作業のロボット化は難しい。人はさまざまな形状をした作業対象に対しても臨機応変な対応が可能だ。一方、ロボットにそれをやらせようと思うと事前に想定しておく必要がある。だが、あらゆる状況を想定することは、そもそも原理的に不可能だ。そのため従来方式では、何かあったら各現場に専門家が出向き、その都度その都度対応しなければならなかった。ロボットシステムの立ち上げや保守運用には必ず人手が必要だ。つまり高コストというわけだ。
そこで昨今注目されているのが遠隔制御である。ロボット自体による自律制御に加え、人が状況を判断してロボットを遠隔から動かすことで、想定外の状況が発生しても、ある程度の範囲であれば対応できる。
要するに、自律制御を遠隔制御で補完するのだ。これにより、ある程度の範囲であれば現場に人が出向く必要がなくなり、しかも複数の現場を少ない人数で見ることができるようになるので、運用コストを低減することが可能になる。
遠隔操作のための通信技術も開発中
遠隔操作の場合、従来は専用回線を用意するのが定番だった。だがコストが高い。安価な遠隔制御のためには遅延や変動が起こる多様な通信条件下でも影響を低減して安定して操作ができる通信システムの実現が必要だ。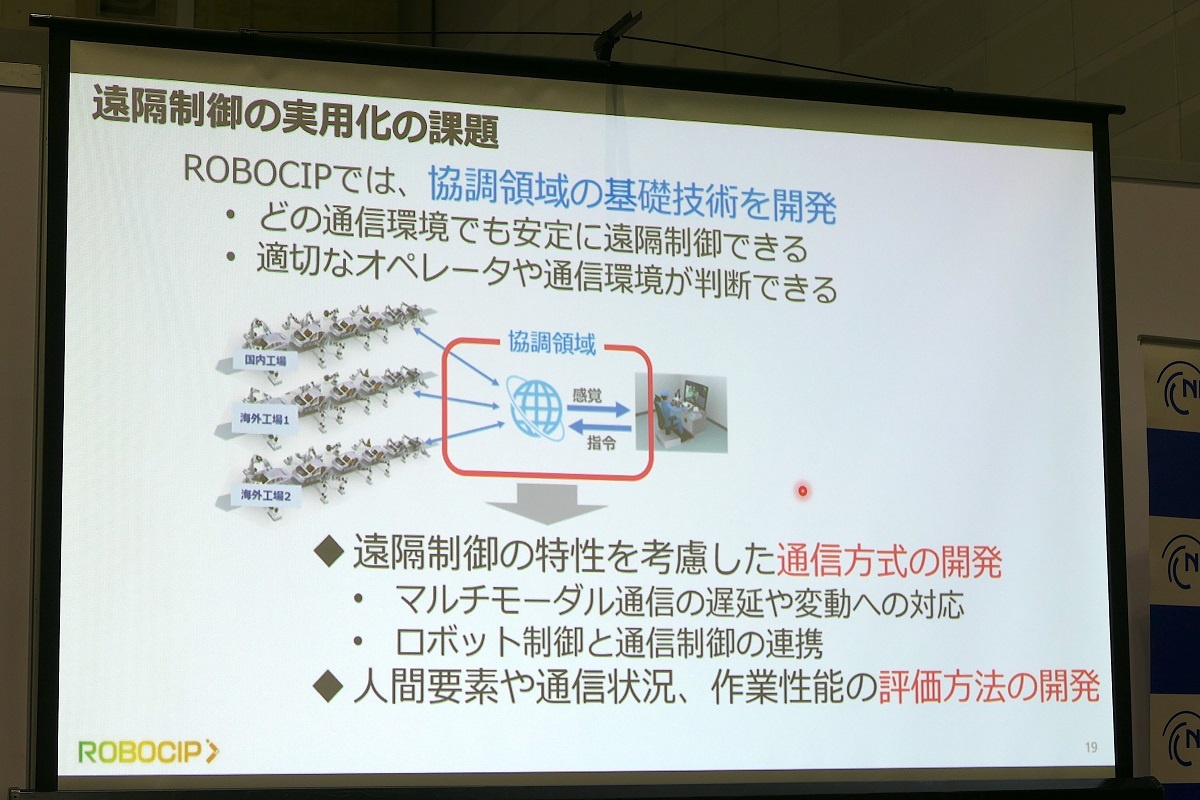
ROBOCIPではメーカーを超えて業界全体の協調領域の基礎技術を開発することを目的としている。遠隔制御においては、どの通信環境でも安定に遠隔制御ができる通信方式だけでなく、人間の要素も制御ループに入ってくるため、オペレーターを含む作業性能の評価方法などを開発中だ。
具体的には、ロボットの制御がどういう状態かによって通信制御を変える。いま力の情報が重要であれば力情報を優先したり、操作感を変えることで、ロバストな遠隔制御の実現を狙う。すでに意図的に変動や遅延を発生させた状況でもその影響を低減して滑らかに操作ができるシステムを各大学とも共同で開発しているという。
このような遠隔制御技術は、時空間の制約を超えた労働者の多様化や、安全性の向上、そして人の判断や技能のデータ化などに使える。つまり、夜間に地球の裏側からでも操作できるし、そのデータをAIのための学習セットとして蓄積することで、さらなる自動化へと進めていくこともできるというわけだ。
【次ページ】新素材による軽量化や新たなセンサーの活用も
ロボティクスのおすすめコンテンツ
関連タグ
タグをフォローすると最新情報が表示されます
あなたの投稿
PR
PR
PR
