- 会員限定
- 2024/10/15 掲載
LiDAR(ライダー)とは何か、自動運転のコア技術が「iPhoneにも搭載」されるワケ
自動運転実現のためのコア技術と期待されていたレーザーセンサー技術「LiDAR(ライダー)」。ここに来て、少し旗色が変わってきた。部品として高価なLiDARを外し、より安価なカメラやミリ波レーダーなどで、自動運転のために必要なADAS(先進運転支援システム)などを代替する動きが、自動車メーカーで見られる。一方で、iPhoneにLiDARが搭載されるなど、活躍の場を広げつつある。LiDARとは何かを解説するとともに、自動車産業による「LiDAR外し」の理由や、iPhoneにLiDARが搭載された理由、市場動向などについても詳しく解説しよう。
Pavism 代表。元トラックドライバーでありながら、IBMグループでWebビジネスを手がけてきたという異色の経歴を持つ。現在は、物流業界を中心に、Webサイト制作、ライティング、コンサルティングなどを手がける。メルマガ『秋元通信』では、物流、ITから、人材教育、街歩きまで幅広い記事を執筆し、月二回数千名の読者に配信している。
LiDARとは何か
LiDARとは「Light Detection and Ranging」の略であり、「ライダー」と読む。LiDARは、レーザー光を対象物に照射し、その反射光を観測することで、対象物までの距離や性質を計測する、レーザーセンサーのことである。
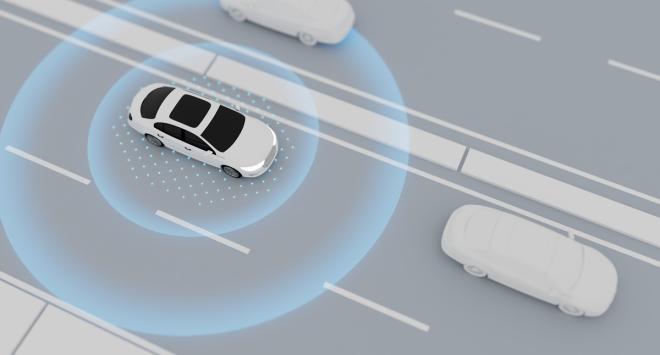
(Photo/Shutterstock.com)
1990年代には測定技術として発展を遂げたが、近年では自動車の安全性と快適性の向上を実現するADAS(Advanced Driver Assistance System/先進運転支援システム)や、その延長線上にある自動運転を支えるセンサーとして注目されている。
LiDARの種類と構成技術
LiDARに使われる技術と種類について、主要なものを解説しよう。もともと、LiDARには走査式のレーザーが使われていた。射出する角度を少しずつ変えながらレーザーを射出し、その反射光を測定し、対象物との距離や、その性質を測定していくのだ。この方式をスキャン式と呼ぶ。
スキャン式では、回転ミラー、ポリゴンミラー、MEMSミラーと、3つに大別される。それぞれの特徴やデメリットを下の図1にまとめている。
| 特徴 | デメリット | |
| 回転ミラー式 | レーザー光を射出するLD(Laser Diode)と反射光を受光するPD(Photo Diode)を含むユニットを丸ごと回転させる。 | 形状としては円柱状になるため、たとえば車両に搭載する場合には、ルーフ部に取り付けられることになり、デザイン上の制約が生じてしまう。 大きい。 |
| ポリゴンミラー式 | LD・PDはともに固定し、射出されたレーザー光を、回転するポリゴンミラー(多角形の鏡)によって方向を変えることで、広範囲をスキャンする。 | 回転ミラー方式に比べれば小さいが、それでも大きい。 |
| MEMSミラー式 | 極小のミラーをアクチュエーターで動かし、レーザー光の射出方向を変える。LiDARの小型化ができる。 | ミラーが小さすぎて精度が下がる。 |
図1:回転ミラー式・ポリゴンミラー式・MEMSミラー式の特徴とデメリット
(筆者作成)
なお、駆動部を持つ回転ミラー方式、ポリゴンミラー方式と区別し、MEMSミラー方式のLiDARはソリッドステート式と呼ばれる(厳密には、MEMSミラー方式も、アクチュエーターという駆動部を持つのだが)。
スキャン式LiDAR・ソリッドステート式LiDARでは、小糸製作所が出資するシリコンバレー発のベンチャー企業、セプトン・テクノロジーが開発したMMT方式(Micro Motion Technology)も注目を集める。
MMT LiDARはミラーレスである。LD・PDに対し、微小な振動を与えることで射出方向を変え、検知角度は60・90・120度から選択できるという。MMT LiDARの量産時コストは、1個あたり1米ドルをクリアできるそうだ。
MMT LiDARは、自動車・ADAS向けのLiDAR市場における台風の目となる可能性がある。
同じくソリッドステート式LiDARでは、iPhoneでも採用されたフラッシュ式もある。
フラッシュ式では、機械的可動部がなく扇状のレーザービームを射出する。構造がシンプルであるがゆえ、小型化・軽量化が実現できるが、解像度や計測距離の点で、他方式よりも劣る。
LiDARにおける距離の測定方法としては、ToF(Time of flight)とFMCW(Frequency Modulated Continuous Wave)があり、さらにToFは、dToF(direct Time of flight)とiToF(indirect time of flight)に分類される。それぞれの特徴を以下に列記する。
- ToF(Time of flight)
レーザーを射出してから反射光を受光するまでの時間差を測定する方式をToFと呼ぶ。パルス波レーザー光を発光する方式が、dToF(direct Time of flight)。
パルス波ではなく、振幅変調連続波(AMCW:Amplitude Modulated Continuous Wave)と呼ばれる振幅を強度変調したレーザー光を連続照射して強度変調する間接飛行時間を計測するのが、iToF(indirect time of flight)である。
dToFでは送信波と受信波の時間差を求めたが、iToFでは送信波と受信波の位相差を求めることとなる。 - FMCW(Frequency Modulated Continuous Wave)
波長(周波数)を連続的に変化させられるレーザー光を使い、送信波と受信波の周波数差を測定することで、対象物との距離を測定する。
FMCWでは、より高精度な測定が可能で、かつ測定対象物との相対速度も検出可能だが、信号処理が複雑になることでコストアップにつながる。
LiDARがiPhoneに搭載された理由
2020年3月に発売されたiPad Proでは、初めてLiDARが搭載された。その後、同年10月に発売されたiPhone 12 Proおよび12 Pro Maxに搭載され、以降iPhoneシリーズにはLiDARが搭載されている。なぜ、Apple社は、iPhoneにLiDARを搭載したのか?
まず考えられるのが、AR(拡張現実)機能を、よりリッチなものとするためである。たとえば従来のARで、「膝にのった猫」を表現しようとすれば、単にユーザーの膝画像上に猫が表示されるだけであった。
だがLiDARによって、AR体験者の手や腕も含む身体との位置関係やサイズ感を計測すれば、触感こそ再現できずとも、少なくとも視覚上は、「膝上でくつろぐAR猫をなでる」様子を、よりリアルに再現できるようになるはずだ。
カメラ機能の強化も考えられる。一般論だがスマートフォンのカメラは、被写界深度の精度が劣るため、背景をぼかした写真を撮影しても、奥行きに乏しく、のっぺりとした印象になりがちだ。だが、LiDARを活用すれば背景までの距離を反映した、より自然なぼかしが実現できる。
また夜間撮影におけるオートフォーカスの速度・精度の向上も期待できる。
iPhoneに搭載されているLiDARの精度や実用性を検証すべく、北海道にある植栽予定地の測量や、群馬県内の洞窟内の空間を3D測量する試みも行われている。
- 植栽予定地(0.11ヘクタール)の測量における誤差は5%以内
- 洞窟(長さ約12メートル、幅3メートル弱、高さ3メートル強)の測量に要した時間は、下見を含め15分
いずれのプロジェクトでも、数百万円を要する専用機器を用いた場合と比較した費用対効果も踏まえ、「十分に実用性がある」と評価している。
iPhoneに搭載されているLiDARの測定可能距離は5メートルほど。100~200メートル先の測定を求められる自動車用LiDARと比べれば、その性能は見劣りするものの、成熟が進むスマートフォン市場における競合機種との差別化手段となっている。
LiDARの市場規模
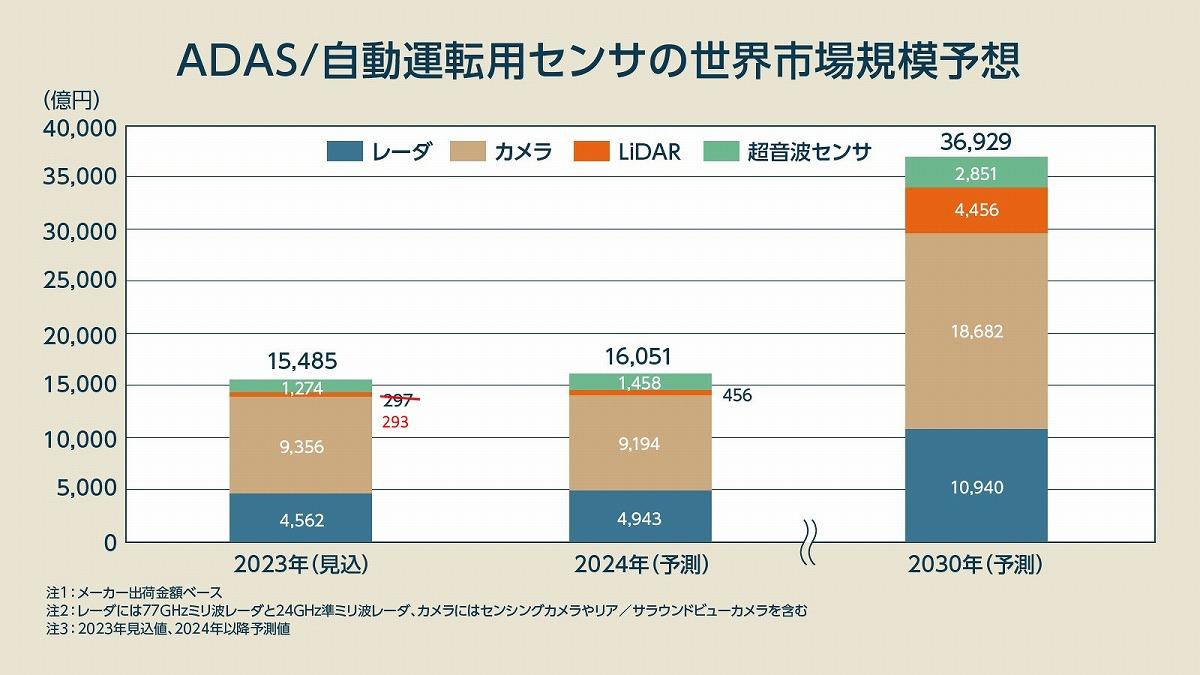
とは言え、やはりLiDARの主戦場となるのは、自動車産業(ADAS)である。「ADAS/自動運転用センサー世界市場に関する調査(2023年)」(矢野経済研究所)によれば、2023年におけるLiDAR世界市場規模は293億円だが、2024年には456億円、2030年には4,456億円まで大幅に拡大すると見込んでいる(図2)。
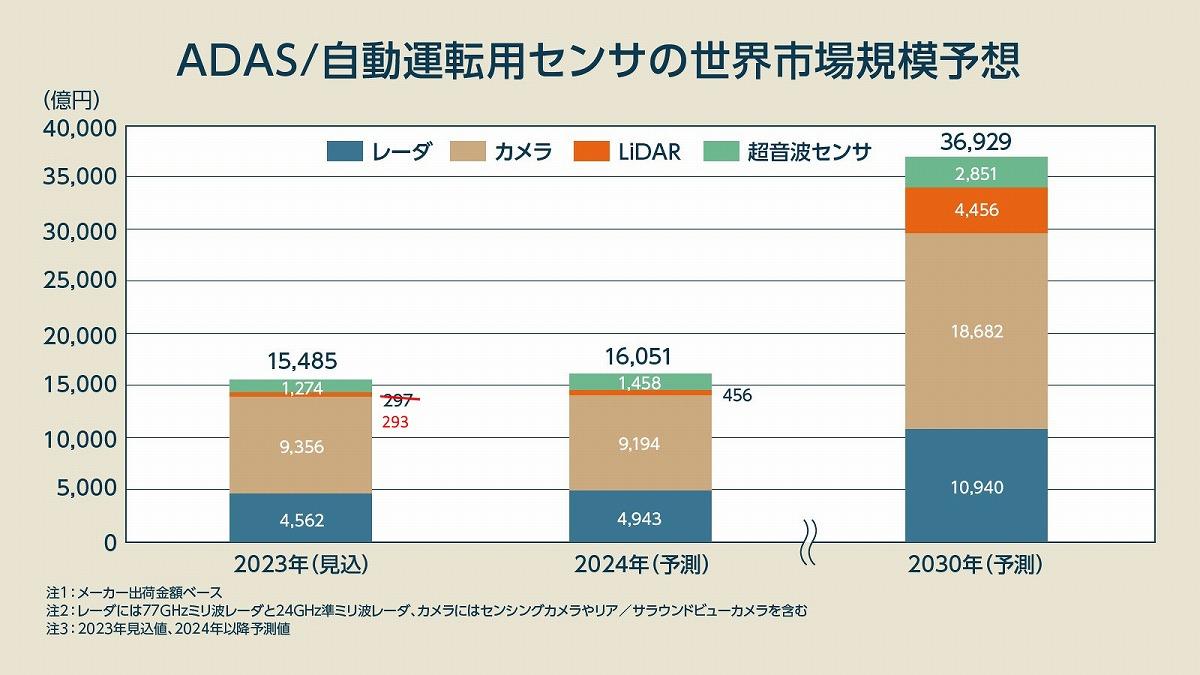
(出典:矢野経済研究所「ADAS/自動運転用センサー世界市場に関する調査(2023年)」より編集部作成)
だが実は、2019年に発表された同じ調査では、2030年におけるLiDAR世界市場の予測値は、4,959億円であった。つまり、この5年間でLiDAR市場の未来予測は約10%も下がったことになる。
その主たる原因は、ADASにおける「LiDAR外し」と考えられる。
比較してわかる「LiDAR外し」が続く理由
ADAS(あるいはその延長線上にある自動運転車両)において、対物検知のためのセンサーは、LiDAR、ミリ波レーダー、カメラの3つが主流だ。最近では、遠赤外線カメラや超音波ソナーの採用例もある。なぜ複数種のセンサーを搭載するのか? それは、1種だけで完璧な検知を実現できるセンサーがなく、またそれぞれの特性を生かすことで、ADASの完成度を高めることができるからだ。
このように、複数種のセンサーを搭載し弱点を補い合う手法を、センサーフュージョンと呼ぶ。
なお、自動運転を実現するためには、「対象物の測定可能距離200メートルを実現できるセンサーが必要」というのが、現在のスタンダードな考え方である。
雨天時、時速130キロメートルで走行した場合、制動距離は約130メートルとなる。200メートル先の対象物を測定できれば、残り70メートルを空走する制動開始前の1.9秒を制動要否判断の演算に費やすことができるからである。
ただカメラ・ミリ波レーダーでは、200メートル先の対象物測定は難しい。3種の特徴とデメリットを図2にまとめているので比較してほしい。
| 特徴 | デメリット | |
| カメラ |
|
対象物までの距離を検出するのは苦手で、暗闇や極端に明るい光、悪天候などには弱い |
| ミリ波レーダー |
|
対象物の形状や種類を認識することは難しく、樹木など電波の反射率が低い物体を検出できない |
| LiDAR |
|
雨などの悪天候下では検出精度が下がる |
図3:カメラ・ミリ波レーダー・LiDARの特徴とデメリット
(筆者作成)
このように比較すると、LiDARの性能は高いのだが、課題はコストである。比較すると以下のとおりだ。
- ADASに採用されるカメラの平均コストは、1万円から2万円。
- ミリ波レーダーは、約1万円。
- 対して、LiDARのコストは、10万円から30万円。
部品コストは車両価格に直結する。もはやADASは自動車には必須装備であるため、自動車メーカーおよびセンサーメーカー各社は工夫を凝らし、ADASにかかるコストを抑えようとしている。 【次ページ】ホンダやスバルの「LiDAR外し」事例
自動運転のおすすめコンテンツ
関連タグ
タグをフォローすると最新情報が表示されます
あなたの投稿
PR
PR
PR
