- 会員限定
- 2017/08/21 掲載
「サイボーグ技術」が現実に、メルティンMMIは「身体的な制約」を突破する
可能性無限大の「3本目の手」
人間と機械を融合させるサイボーグ技術は、すでに現実のものとなりつつある。実際に人間の筋電位や脳波を利用して、機械を制御しようという試みは各所で進められている状況だ。2013年に電気通信大学内インキュベーション施設(電通大横井研発ベンチャー)にてメルティンMMIを創業した粕谷昌宏氏は、アフレル主催の「Robotics Education Day 2017」に登壇し、ベンチャーを起業するに至った経緯や、同社のユニークな生体信号処理技術やロボット技術、そしてサイボーグ技術の可能性について語った。
機械学習で手首や小指、薬指、親指などの繊細な動作を識別
関連記事
これまで人間は、さまざまな機械をつくり、世界の環境に適応してきた。たとえば電話は遠く離れた人同士を結んでいる。人と人の距離を縮め、コミュニケーションの発展に大きく寄与した発明だ。また自動車は人が走れない速度で遠距離を移動できる有効な手段になった。足が不自由な人には、車イスをつくり、移動に支障がないように工夫した。
このように、機械によって人間のバリアを取り除くことはできる。しかし、その機械を制御するのは、最終的に人間の筋肉だ。電話で話をするにしても、喉の筋肉で声帯をコントロールして声を出している。クルマもアクセルやブレーキを人間の脚で制御している。そう考えると、どんな機械を使ったとしても、筋肉の応答速度よりも早く反応することは難しい。つまり人間の行動の由来は、すべて筋肉に基づいているともいえるわけだ。
粕谷氏は「これこそ人間の可能性を制約している要因のひとつだと考えている。このバリアを突破するためには、筋肉以外の方法で外界とやり取する必要がある。そこで考えたのが生体信号だった」と説明する。
生体信号は、人体を流れる電気信号だ。脳から神経に電気信号が流れて、筋肉を収縮させることで手足が動く。逆に何かモノに触って冷たい、あるいは熱いといった感覚が得られるのは、すべて電気信号が脳に伝えられるからだ。これらの生体信号は、-70mVをLow(0)、30mVをHigh(1)としたデジタル通信のフォーマットとして伝達される。
粕谷氏は「そこで同じデジタル通信であるコンピュータと接続できるサイボーグ技術の考え方が登場する。つまり生体信号を読み取り、それらを解析して、機械を制御することによって、人間の機能を補完したり、拡張することが可能になる」と説く。
メルティンMMIは、冒頭のように電気通信大学発のベンチャーとして、サイボーグ技術を駆使し、人間の身体的な制約を突破するという大きな目標に掲げている。具体的な基礎技術的としては、「生体信号処理による解析」と「ロボットのコントロール」という大きな2つの特殊な技術を持っている。
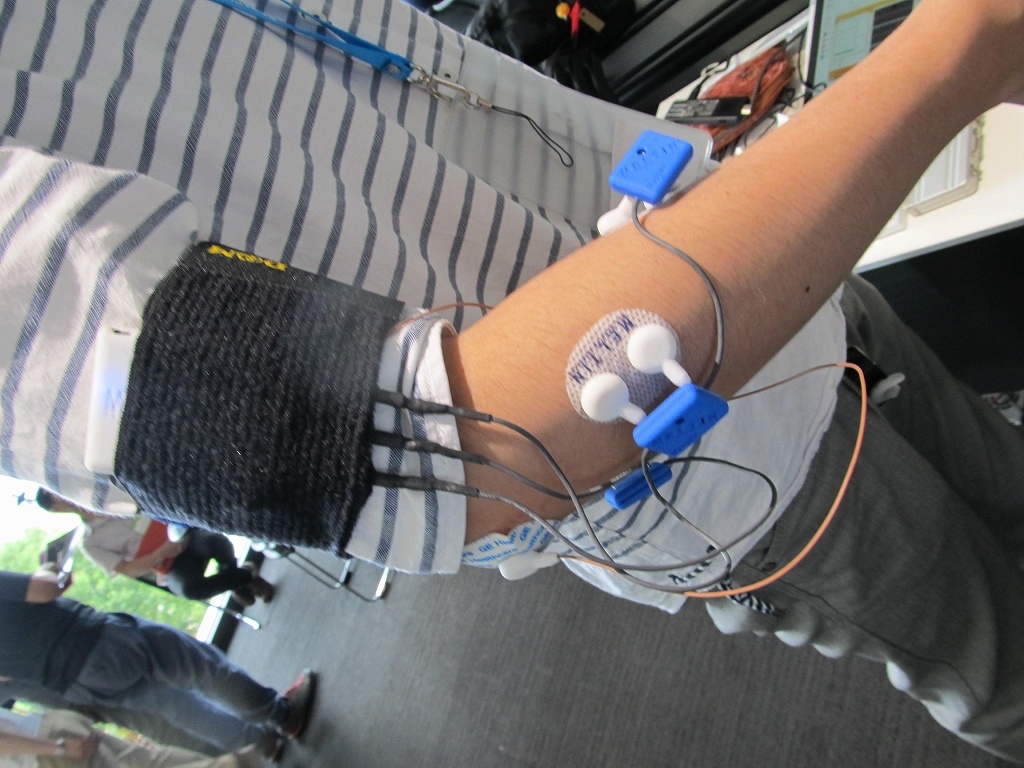
まず生体信号処理では現在義手に注目しており、筋肉に流れる表面筋電位(EMG)をセンサーでキャッチし、それを読み取ることで、指などの動きを推定できる。従来も筋電位を使った義手制御は行われてきた。ただし生体信号が発生したか、あるいは発生していないかという波形のON/OFFのシンプルな判別が主流だった。しかし同社では波形そのものに着目し、機械学習を活用することで、手首や小指、薬指、親指などの繊細な動作を、12種類の信号パターンで識別できるようにした点が大きな違いだ。
「我々の強みは、識別できるパターン数が多く、高精度で学習時間も高速なことだ。生体信号を識別するためにはまず信号の特徴をアルゴリズムが学習しなくてはならないが、コンピューティングパワーを要するため、かなり処理時間がかかってしまう。しかし、それでは精度が良くても実用性に欠ける。他の研究では、生体信号の学習に分単位の時間がかかっているが、我々の場合は数秒という高速処理が可能だ」(粕谷氏)
さらに同氏は、生体信号とロボットハンドの動作の対応関係を自己学習する情報理論として「自己拡張型アルゴリズム」も研究している。これによって生体信号の信号パターンを教示せずとも、ロボットハンドを使っているだけで、そのロボットハンドが自分の体の一部のように馴染むようになるそうだ。
ロボットハンドと車イスで「サイバスロン」にも出場
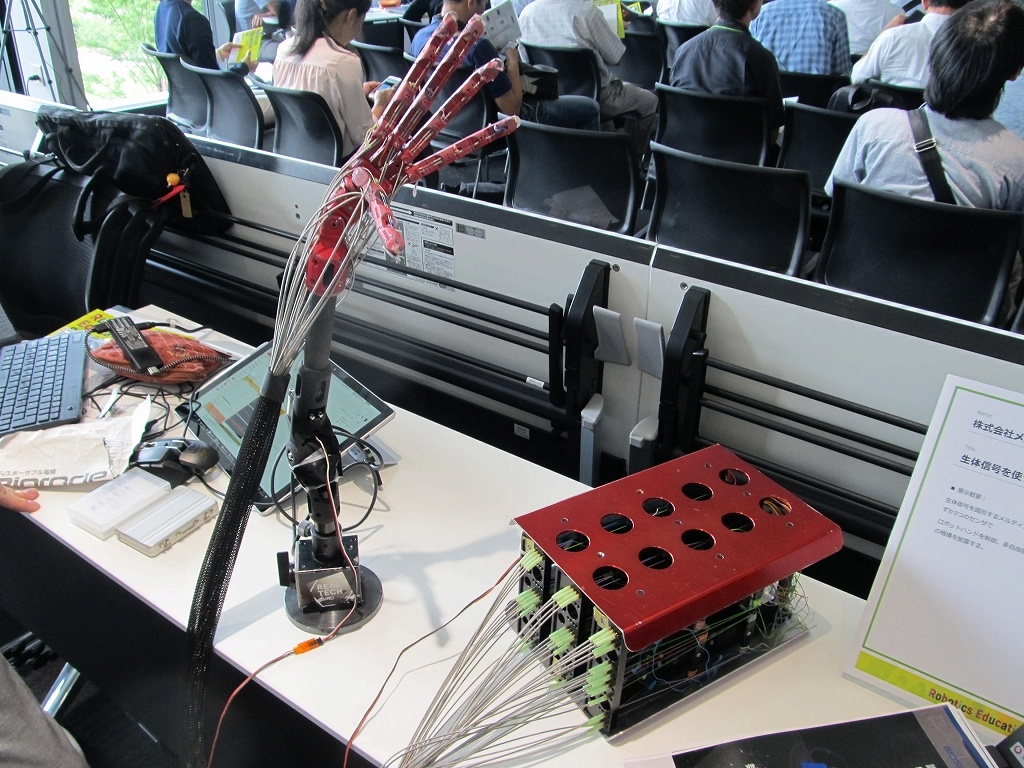
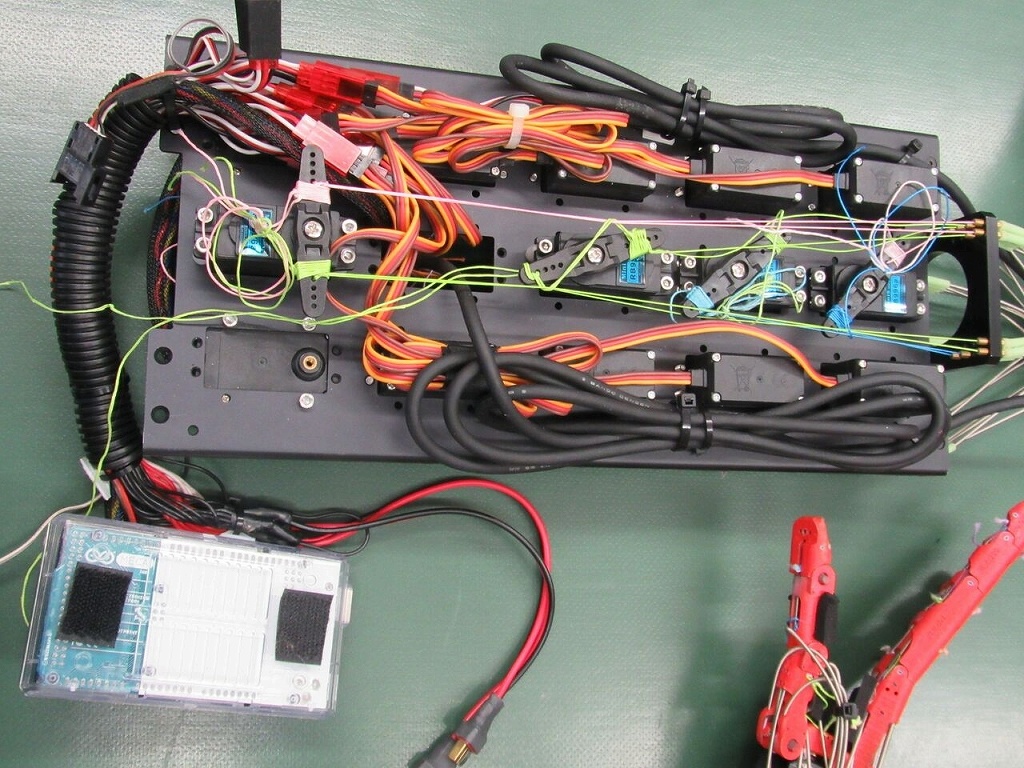
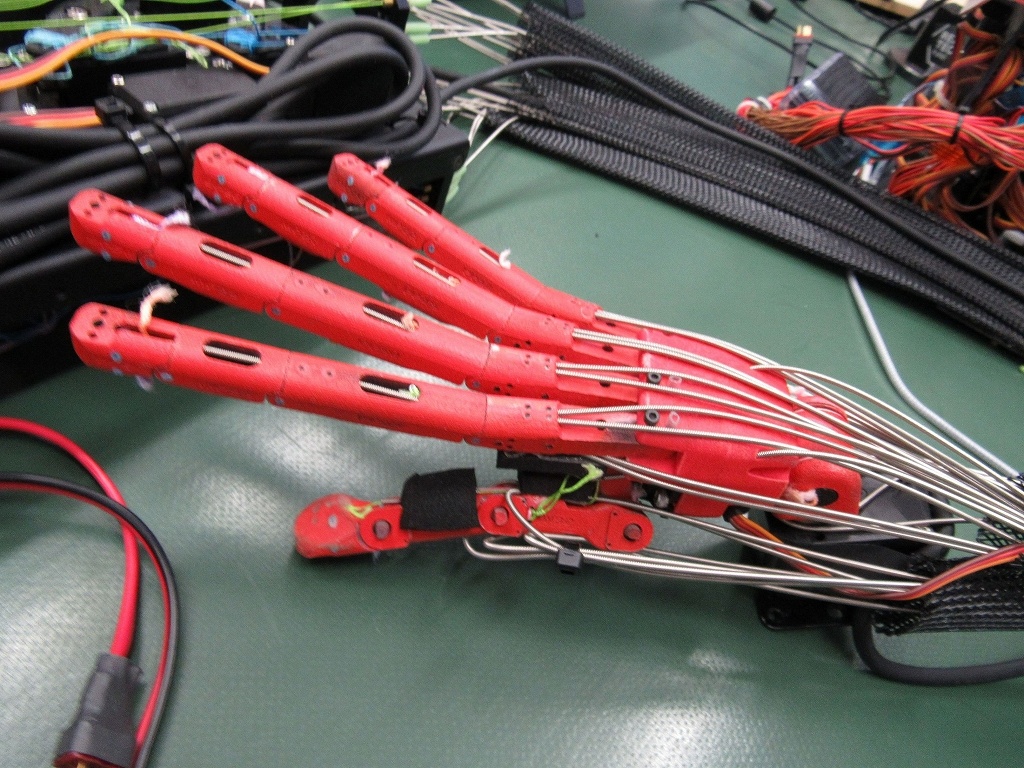
もうひとつのメルティンMMIの特徴は、ロボットの制御技術に長けていることだ。通常のロボットの場合は、関節部にひとつずつアクチュエータ(サーボモータ)を採用しているケースが多い。同社では、前出の筋電義手タイプのロボットハンドを開発しているが、実はその構造も制御方法も大変ユニークだ。同社のロボットハンドの指関節部には、駆動系のサーボモータは一切付いていない。別途開発したワイヤー牽引機構内に、各四指×2個、親指×3個、手首×2個ぶん(計13個)のサーボモータを内蔵しており、このワイヤー牽引機構により、ロボットハンドの3つの関節と指の根元が引っ張られ、複雑に張力を強め合う干渉駆動を行っている。
「この干渉駆動方式により、これまでロボットハンドの限られたスペースでトレードオフの関係にあった自由度と握力の関係を両立できるようになった。人間と同サイズの人差し指と中指と親指だけで、1.2㎏までモノを持ち上げられる」(粕谷氏)
手を失った人が、この特殊な機構のロボットハンドを装着することで、筋電位がトリガーとなり、そのパターン解析によって、義手側の指や手首の関節などを正確かつ高速に動かせるようになるわけだ。
【次ページ】「この技術の可能性は無限大だ」とする3本目の手
ロボティクスのおすすめコンテンツ
関連タグ
タグをフォローすると最新情報が表示されます
あなたの投稿
PR
PR
PR
