- 会員限定
- 2018/01/16 06:40 掲載
産業用ロボットソフトウェア企業「MUJIN」、なぜ急成長できているのか?
森山和道の「ロボット」基礎講座
「2017国際ロボット展」の産業用ロボットゾーンで、社員数45名にもかかわらず大企業並みの52小間の大ブースを構え、FA(ファクトリーオートメーション)と物流ロボットのソリューションを15セル、計20台も出展していた創業6年のベンチャー企業がある。産業用ロボットのコントローラーを提供しているソフトウェア会社のMUJINだ。同社のコントローラーを使うと、ロボットを従来よりも高度に、かつ容易に動かせるようになる。指数関数的に成長しはじめており、今後さらなる飛躍が予想されるMUJINの現在と今後について、ここでレポートしておきたい。同社の技術を追うことで、ロボットが今後どんなことができるようになるのか、どのように世界を変えていくのか、その一端が垣間見えるからだ。
フリーランスのサイエンスライター。1970年生。愛媛県宇和島市出身。1993年に広島大学理学部地質学科卒業。同年、NHKにディレクターとして入局。教育番組、芸能系生放送番組、ポップな科学番組等の制作に従事する。1997年8月末日退職。フリーライターになる。現在、科学技術分野全般を対象に取材執筆を行う。特に脳科学、ロボティクス、インターフェースデザイン分野。研究者インタビューを得意とする。

複雑な作業をプログラムなしで実現する、MUJINのコントローラー

連載一覧
ロボットを動かすには「コントローラー(制御器)」が必要だ。アームなど、ロボット本体に対して指令を出すコンピューターで、ロボットの性能を左右する重要な頭脳である。
人が作ったロボットアームの動かし方を、確実にブレなく高速で再生するのが、従来の産業用ロボットの主な用途だった。次世代型のロボットコントローラーには「これを、ここに、こうしたい」といった、より高次の命令を与えられると、それを実行するために必要な関節の動き方をコントローラーが自動生成することが期待されている。これにより、ロボットはさらに現場に導入しやすいものになる。
MUJINは、この知能ロボットコントローラーを開発・販売しているベンチャー企業で、ロボットの「動作計画(モーション・プランニング)」をリアルタイムに行う技術を中核とする。MUJINのコントローラーを使えば、産業用ロボットの動作をリアルタイム逆運動学計算で生成し、ティーチレス――ロボットの各関節の角度や位置を一つ一つ指定することなく、ロボット自身にアームの動かし方を計算させることができる。
この技術と同社の3Dセンサーを組み合わせると、事前に想定することができない、さまざまな物が流れてくる物流などの現場でのピッキング作業もこなすことが可能になる。また、多関節のロボットの動きを指定するのは案外難しく、職人技的な経験で行っていた部分も多いが、MUJINのコントローラーにはロボットアームの軌道を最適化する機能もあり、タクトタイム(1作業あたりの単位時間)を最短にすることも可能だ。
多品種を自動ピッキング、オムロンとの共同デモも
「2017国際ロボット展」でのブース展示の様子を見てみよう。なお繰り返しになるが、デモはすべてロボットアームを使ったものだったが、MUJINはロボットアーム自体ではなく、あくまでロボットを制御するソフトウェア、コントローラーを販売している企業だ。どんな会社のロボットアームにも適用できる汎用性を売りにしている。各社のロボットコントローラーの上位にMUJINのコントローラーを置き動作指令を与えることで、ロボットの自律動作を可能にする仕組みだ。実際MUJINのブースで稼働していたロボット20台はすべて、メーカーソフトではなく共通のMUJINコントローラによって制御されていた。
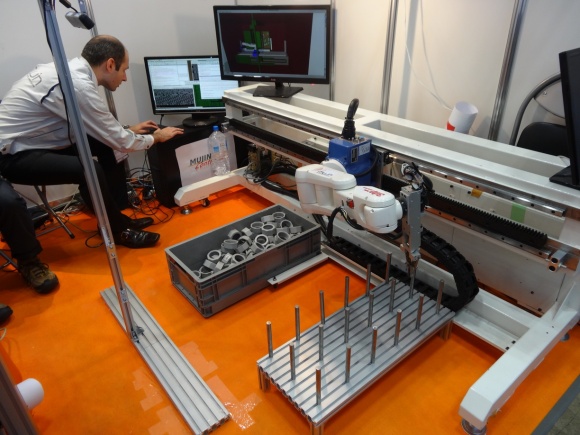
まず目を引いたのは、物流向けの多品種のピックシステムだ。同社の「ピックワーカー」と、部品の位置や姿勢を認識するためのMUJIN3Dビジョンを使うと、多品種の物体をピックして運ぶことができる。モーションプランニング技術によりロボットアームの干渉も自動で回避し、把持計画(物体をどのようにつかむか)を立てるため、深い箱からでもティーチレスでワークを取り出すことができる。
このMUJINの物流用の多品種ピッキングはすでに「MUJINピースピッキングソリューション」としてパッケージ化されている。登録システムに商品を放り込み、形状や商品の柄を1分で自動登録さえすれば、ロボットがすぐにピッキングを開始する、「誰にでも使える」「すぐにロボットが動く」画期的なロボットソリューションだ。
ピックワーカーを使うには、1)ペンダント上で干渉物とワークの3DCADデータの登録、2)ワークの把持位置の登録、3)搬送位置や姿勢の登録の3ステップを行う。これによって3週間程度でバラ積みピッキングシステムの立ち上げが可能になる。
ブースでは3種の金属ワークピースをハンドを交換しながらピックしたり、チューブや箱型の製品など数十品種が入ったケースから物品をピック・分類する様子がデモされていた。多品種をロボットがピッキングできるようになれば、入庫、仕分け、梱包といった工程をまるごと自動化することが可能になり、システム全体の生産性を向上させることができる。

また、ロボット展でのMUJINブースは隣のオムロンブースとつながっており、その中間のエリアではオムロンのモバイルロボットとMUJIN のピックワーカーを組み合わせた、多品種ピッキングがデモされていた。
生産ラインの一部を模擬したもので、モバイルロボットの上に乗せられたオリコン(折りたたみ式コンテナ)にアームがピッキングしたワークピースが乗せられて、それがある程度たまるとモバイルロボットが移動して隣のラインに運んでいくといったものだ。ちなみに、オムロンの代表取締役CEOの山田義仁氏とMUJINのCEO滝野一征氏は2015年以来懇意だという。

「コンビニ物流向け全自動商品配送ライン」と名前の付けられた弁当ピックシステムも興味深かった。冷蔵されている弁当のような商品をパレットから移して、「番重(ばんじゅう)」(食品業界で使われることの多い、薄い運搬容器)に箱詰めしていく作業をイメージしたデモだ。
人手不足の中、少しでも人を採用しやすくするためには労働環境の改善が必要となる。そのためにも、冷蔵倉庫のような、人間が作業するには厳しい環境での商品仕分けと配送作業をロボットが代替することが期待されている。
新商品の追加も容易で、認識したら自律でピッキングしていき、番重の入れ替えもロボットが自動で行う。そのロボットもMUJINが2018年から販売を予定している「ティーチワーカー」というロボットコントローラーで制御されているのである。
トラックからの自動荷下ろしシステムを開発中

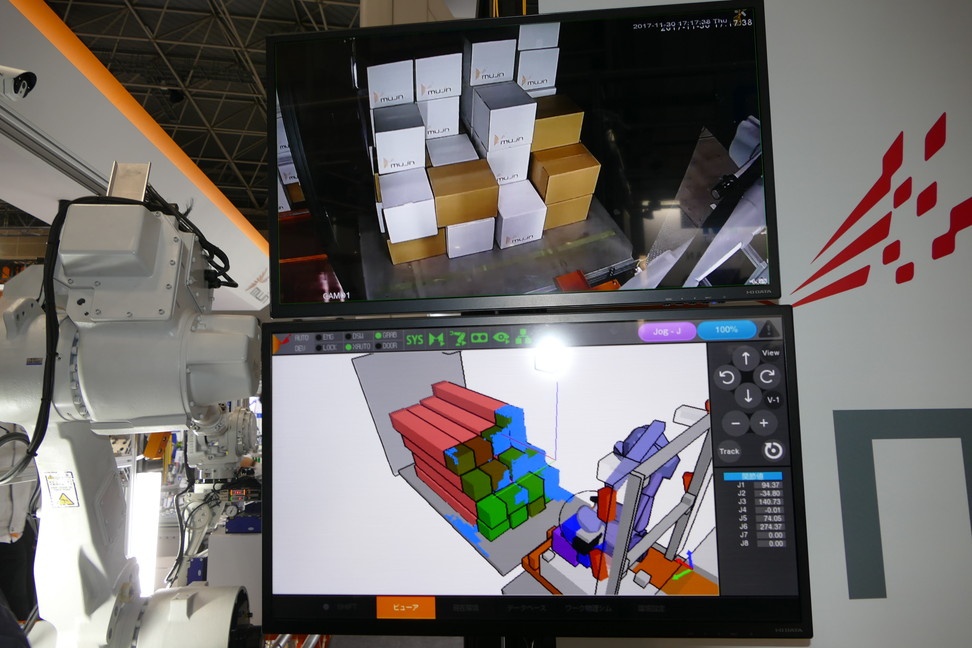
一番面白かったのは現在開発中のトラックコンテナからの荷下ろし(デバンニング)である。現在、荷下ろし作業はトラックドライバーが行っており、これはドライバーが嫌がる作業の一つとされている。10kg、20kgある荷物を多数、運転後に下ろさなければならないのだから当然だ。しかし、その嫌がられる作業を自動化するためのロボットソリューションである。
箱が詰まったトラックの荷台から、ロボットが自動で箱を認識、荷下ろしをしていく。荷下ろしのためには大型ロボットが必要だが作業スペースは限られているし、ロボット自身がカメラの視界を遮ることも多く、難度が高い作業だ。
ロボットは走行架台の上に載せられていて、ある程度荷物を降ろすと、ロボット本体が中に突っ込まれて作業を続けるようになっている。これが実現すればドライバーはこの作業の分は休憩ができるし、トラック自体の効率もあげることができる。

|
|
この先にあるものは完全自動の出荷センターである。自動倉庫、自動出荷センターのあいだでロボットアームが自動で荷物を出し入れし、自動フォークリフトや搬送ロボットが輸送する。さらにその先は…、言うまでもないだろう。MUJINがブースで示していた「次世代ピース出荷センター」のPVがわかりやすい。
「こいつとなら失敗しても、また挑戦できる」と考えて創業へ

MUJINが創業されたのは2011年。創業者は現CEOの滝野一征(たきの・いっせい)氏と、現CTOのデアンコウ・ロセン氏(Rosen Diankov、漢字表記は「出杏光 魯仙」)の2人だ。
当時、滝野氏は硬切削工具メーカー・イスカルジャパンの営業マンをつとめていた。一方のロセン氏はカーネギーメロン大学で金出武雄氏に師事し、2006年にロボット動作計画のためのオープンソースプラットフォーム「OpenRAVE」を開発し博士号を取得、当時は東京大学大学院のポスドクだったという。

2人は2009年に国際ロボット展に出展していたWillow Garage(ウィローガレージ)社のブースで出会った。
少し脱線するが、Willow Garage社はロボット用ミドルウェアの「ROS」を開発した会社で、2006年にスコット・ハッサン氏が設立した。「ロボット研究のシンクタンク兼インキュベーション・センター」と自社を位置づけ、他にもコンピュータビジョン向けのオープンソース・ライブラリー「OpenCV」などのソフトウェアのほか、研究用の双腕移動ロボット「PR2」を開発していた。
2014年にWillow Garage社は事業停止したが、「OpenCV」や「ROS」はデファクトスタンダードとなり、Fetch RoboticsやSaviokeなど同社からスピンオフした企業はロボット業界で存在感を発揮し続けている。

|
|
当時、ロセン氏はWillow Garageに在籍しており、一方の滝野氏は、大学時代からの知己であるWillow Garage社大山彰久氏にロボット展での展示を手伝えと言われ有給休暇を取ったのだという。そこで2人が出会った。
この手の話にしては珍しく、技術を持つロセン氏が猛烈に滝野氏にアタックした。ブースで滝野氏が「ROS」について熱く語る姿が印象に残ったらしい。当初はまったく乗り気ではなかった滝野氏だったが、ロセン氏に押し切られるかたちで創業となった、と回顧記事にはよく書かれている。
今回の筆者による取材でも、滝野氏は「あの人(ロセン氏)はアタマぶっとんでるんです。めちゃくちゃしつこくストーキングされていた」と笑って語り、大阪の実家にいるときに「今、大阪に来ているから」と言われて仕方なく御堂筋のカフェで会い「96ページの博士論文の内容を2時間かけて説明された。わかるわけがない。でも2%くらいわかった」というエピソードを紹介してくれた。
そもそもロセン氏の技術はソフトウェアであり、製品もモノも何もない。「できる」と言われてもロボットのハードウェアがない状態では、極論すれば「信じるか、信じないか」しかない。滝野氏は「うまくいくと思っていたから一緒に始めたわけじゃない。『彼と一緒なら失敗してもまた挑戦できる』と思ったから」起業した、と当時を振り返る。
とは言うものの、もちろん実際にはそれなりの目算があったのだろう。最初はお互いに前職に在籍したまま活動を続けていたが、2011年に創業となった。
そしてMUJINは2012年、大学発ベンチャーを支援するベンチャーキャピタルの東大エッジキャピタル(UTEC)から7,500万円の出資を受け、本格的に活動を開始する。当初はロボットアームの動作最適化や、最適レイアウトの算出用ソフトウェアに事業のフォーカスを絞っていた。
2014年にはJAFCOとUTECから総額6億円の資金を調達して、事業を拡大。2015年3月に「ピックワーカー」、同年12月に「ティーチワーカー」を開発・販売し、今日に至っている。「ピックワーカー」は2016年、経済産業省の「第7回ロボット大賞(経済産業大臣賞)」を受賞した。
MUJINは2016年、アスクルと業務提携契約を結び、物流センターのピッキング工程の自動化に取り組んでいる。2017年10月には、中国EC第2位の京東商城(JD.com)が上海に新設する「世界初の完全自動化倉庫」用として、ロボットシステム18台分を受注したと発表した。MUJINの売上は非公開だが、JD.comの案件だけで数億円の受注額があることは明らかであり、爆発的に成長していることは取材でも認めている。
この例に限らず、MUJINは国内だけでなく、国外にも業務拡大を進めようとしている。倍々で成長を続けているが、さらなる飛躍を目指して遠からず上場するのではないかという声も聞こえ始めている。MUJINはどのような世界を見ているのだろうか。
【次ページ】MUJIN CEO滝野氏、PR&HRマネージャー山内氏が語るMUJINの哲学
ロボティクスのおすすめコンテンツ
関連タグ
タグをフォローすると最新情報が表示されます
ロボティクスの関連コンテンツ
あなたの投稿
PR
PR
PR
